数据结构与算法学习日记(理论部分)
数据结构与算法学习日记(理论部分)
1.优先级队列及二叉堆 参考文章:点击这里跳转我们可以使用数组来模拟二叉堆(本质上还是一棵二叉树)
此处我们只讨论索引从0开始的情况
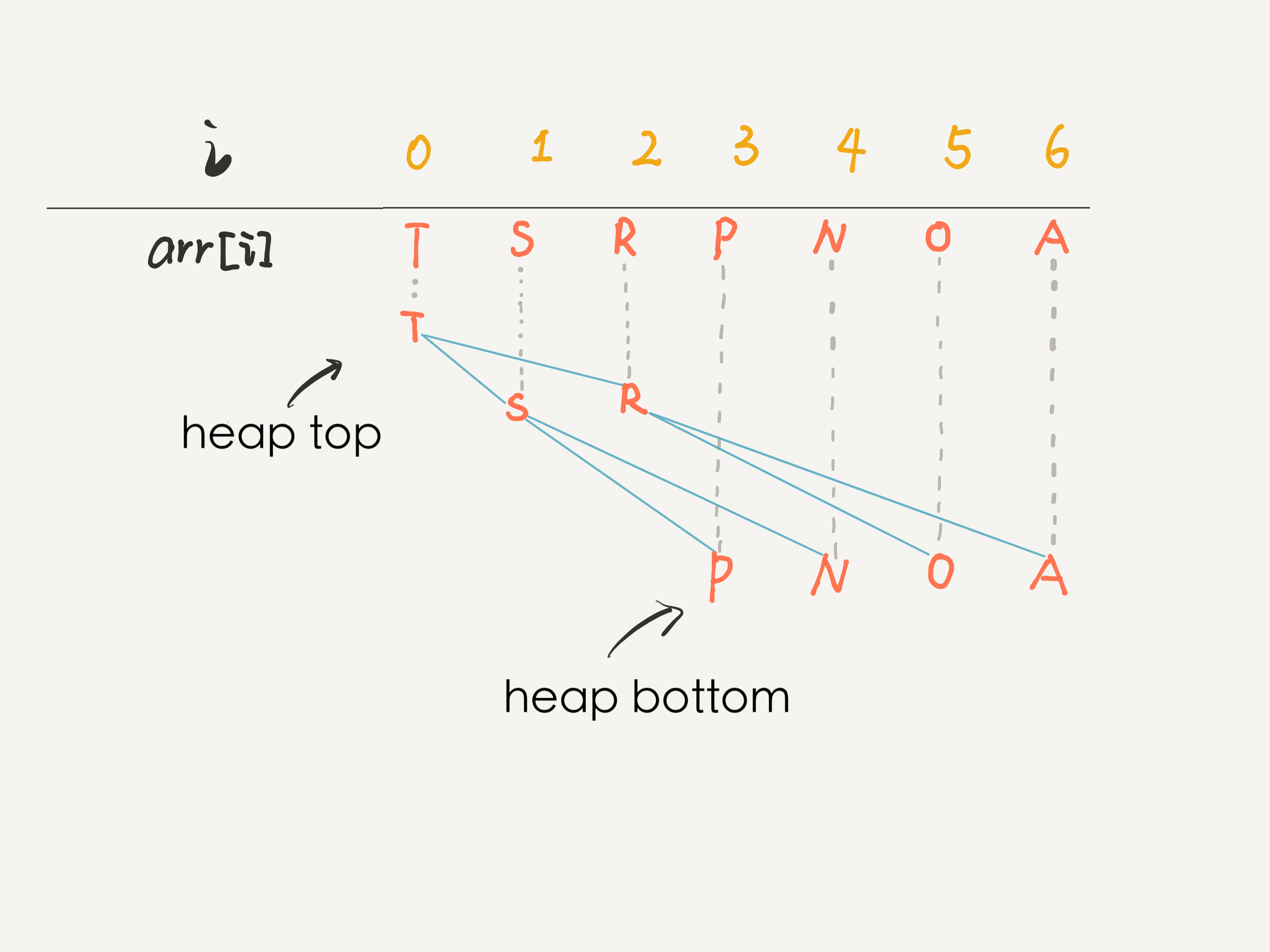 因此我们可以得到父节点,左右子节点的索引公式
因此我们可以得到父节点,左右子节点的索引公式
// 父节点的索引
int parent(int node) {
return (node - 1) / 2;
}
// 左子节点的索引
int left(int node) {
return node * 2 + 1;
}
// 右子节点的索引
int right(int node) {
return node * 2 + 2;
}
核心操作:增
以小顶堆为例,向小顶堆中插入新元素遵循两个步骤:
1、先把新元素追加到二叉树底层的最右侧,保持完全二叉树的结构。此时该元素的父节点可能比它大,不满足小顶堆的性质。
2、为了恢复小顶堆的性质,需要将这个新元素不断上浮(swim),直到它的父节点比它小为止,或者到达根节点。此时整个二叉树就满足小顶堆的性质了。
核心操作:删
以小顶堆为例,删除小顶堆的堆顶元素遵循两个步骤:
1、先把堆顶元素删除,把二叉树底层的最右侧元素摘除并移动到堆顶,保持完全二叉树的结构。此时堆顶元素可能比它的子节点大,不满足小顶堆的性质。
2、为了恢复小顶堆的性质,需要将这个新的堆顶元素不断下沉(sink),直到它比它的子节点小为止,或者到达叶子节点。此时整个二叉树就满足小顶堆的性质了。
用数组模拟二叉堆的原因
1.链表节点需要一个额外的指针存储相邻节点的地址,所以相对数组,链表的内存消耗会大一些。
2.假如我们使用二叉树来构造二叉堆,那么就需要层序遍历或递归遍历二叉树,时间复杂度是 O(N),导致push和pop方法的时间复杂度也为O(N),假如我们使用数组,那么时间复杂度就为O(1)
优先级队列完整代码实现
此处以二叉堆实现为例
#include <iostream>
#include <vector>
#include <functional>
#include <stdexcept>
#include <algorithm> // 添加这个头文件用于 std::swap
template<typename T>
class MyPriorityQueue{
private:
//堆数组
std::vector<T> heap;
//堆中元素的数量
int size;
//元素比较器
std::function<bool(const T&, const T&)> comparator;
//父节点的索引
int parent(int node){
return (node - 1) / 2;
}
//左子节点的索引
int left(int node){
return node * 2 + 1;
}
//右子节点的索引
int right(int node){
return node * 2 + 2;
}
//交换数组的两个元素
void swap(int i, int j){
std::swap(heap[i], heap[j]); // 使用 std::swap
}
//调整堆的大小
void resize(int capacity){
heap.resize(capacity);
}
//上浮操作,时间复杂度是树高O(logN)
void swim(int node){
while(node > 0 && comparator(heap[parent(node)], heap[node])){
swap(parent(node), node);
node = parent(node);
}
}
//下沉操作
void sink(int node){
while(left(node) < size){
int min = node;
int l = left(node);
int r = right(node);
// 使用 comparator 进行比较
if(l < size && comparator(heap[min], heap[l])){
min = l;
}
if(r < size && comparator(heap[min], heap[r])){
min = r;
}
if(min == node){
break;
}
swap(node, min);
node = min;
}
}
public:
//构造函数 - 参数名改为 comp 避免与成员变量混淆
MyPriorityQueue(int capacity, std::function<bool(const T&, const T&)> comp)
: heap(capacity), size(0), comparator(std::move(comp)){}
//返回堆的大小
int getSize() const{
return size;
}
//判断堆是否为空
bool isEmpty() const{
return size == 0;
}
//查,返回堆顶元素,时间复杂度O(1)
const T& peek() const{
if(isEmpty()){
throw std::underflow_error("Priority queue underflow");
}
return heap[0];
}
//增,向堆中插入一个元素,时间复杂度O(logN)
void push(const T& x){
//扩容
if(size == heap.size()){
if(heap.size() == 0){
resize(1);
} else {
resize(2 * heap.size());
}
}
//把新元素追加到最后
heap[size] = x;
//然后上浮到正确位置
swim(size);
size++;
}
//删,删除堆顶元素,时间复杂度O(logN)
T pop(){
if(isEmpty()){
throw std::underflow_error("Priority queue underflow");
}
T res = heap[0];
//把堆底元素放到堆顶
swap(0, size - 1);
size--;
//然后下沉到正确位置
sink(0);
//缩容
if(size > 0 && size <= heap.size() / 4 && heap.size() > 1){
resize(heap.size() / 2);
}
return res;
}
};
// 测试代码
int main() {
// 使用lambda表达式来传递比较器
// 小顶堆
MyPriorityQueue<int> pq(3, [](const int& a, const int& b) { return a > b; });
pq.push(3);
pq.push(1);
pq.push(4);
pq.push(1);
pq.push(5);
pq.push(9);
// 1 1 3 4 5 9
while (!pq.isEmpty()) {
std::cout << pq.pop() << " ";
}
std::cout << std::endl;
// 测试大顶堆
MyPriorityQueue<int> pq2(3, [](const int& a, const int& b) { return a < b; });
pq2.push(3);
pq2.push(1);
pq2.push(4);
pq2.push(1);
pq2.push(5);
pq2.push(9);
// 9 5 4 3 1 1
while (!pq2.isEmpty()) {
std::cout << pq2.pop() << " ";
}
std::cout << std::endl;
return 0;
}
语法部分:
1.什么时候应该用move?
// 1. 构造函数参数(避免拷贝)
MyClass(std::vector<int> v) : data(std::move(v)) {}
// 2. 函数返回值(自动移动,不需要显式move)
vector<int> createVector() {
vector<int> v = {1, 2, 3};
return v; // 自动移动,不需要 std::move(v)
}
// 3. 转移资源所有权
unique_ptr<Widget> ptr1 = make_unique<Widget>();
unique_ptr<Widget> ptr2 = std::move(ptr1); // ptr1 失去所有权
2.std::function<bool(const T&, const T&)> comp
等价写法:
// std::function 写法
std::function<bool(const T&, const T&)> comp;
// 等价的函数指针写法
bool (*comp)(const T&, const T&);
// 等价的函数引用写法
bool (&comp)(const T&, const T&);
数据结构与算法学习日记(理论部分)
https://aoiblog.top/2026/03/23/shu-ju-jie-gou-yu-suan-fa-xue-xi-ri-ji-li-lun-bu-fen/
评论区